大不況の時こそイノベーションへの効果的な投資を!!(その2)
~三重大のメカトロ・ロボットの研究室を覗いてみよう~
さて、前回のブログで紹介した工学部長室でのネット上でのカリフォルニア大学との交信の後、いくつかのメカトロ・ロボットの研究室を覗かせていただきました。
システム設計研究室のテーマは「機会と人間との調和」ということです。まず、池浦良淳さんに自動姿勢調整椅子を見せていただき、私も実際に座って感触を確かめました。つぎに、重いものでも軽くうごかすことのできる「パワーアシスト装置」を体験しました。
従来の“人間工学”つまり “物や環境を人が自然な動きや状態で使えるように設計する工学”では、たとえば、多くの健康な人を計測して平均値をとることで椅子が設計されていました。ところが、リハビリや介護用の椅子となると、それだけでは不十分で、医学的に良いという根拠が必要であること、そして、そのような研究はまだまだ不十分であり、医学部と工学部の連携が必要であるということでした。
なるほどね。

システム設計研究室の院生たちと |
自動姿勢調整椅子の体験 |

自動姿勢調整椅子 |
メカトロニクス研究室では加藤典彦さんに上肢リハビリ装置を見せていただきました。実際に私も動きを体験して確かめてみました。Wearable Motion monitor(装着可能動作モニター)は、体に装置を装着して体を動かすと、その動きがディスプレー上に映し出されるというものです。
|
パワーアシスト装置の体験 |
上肢リハビリ装置の体験 |
装着可能動作モニター |



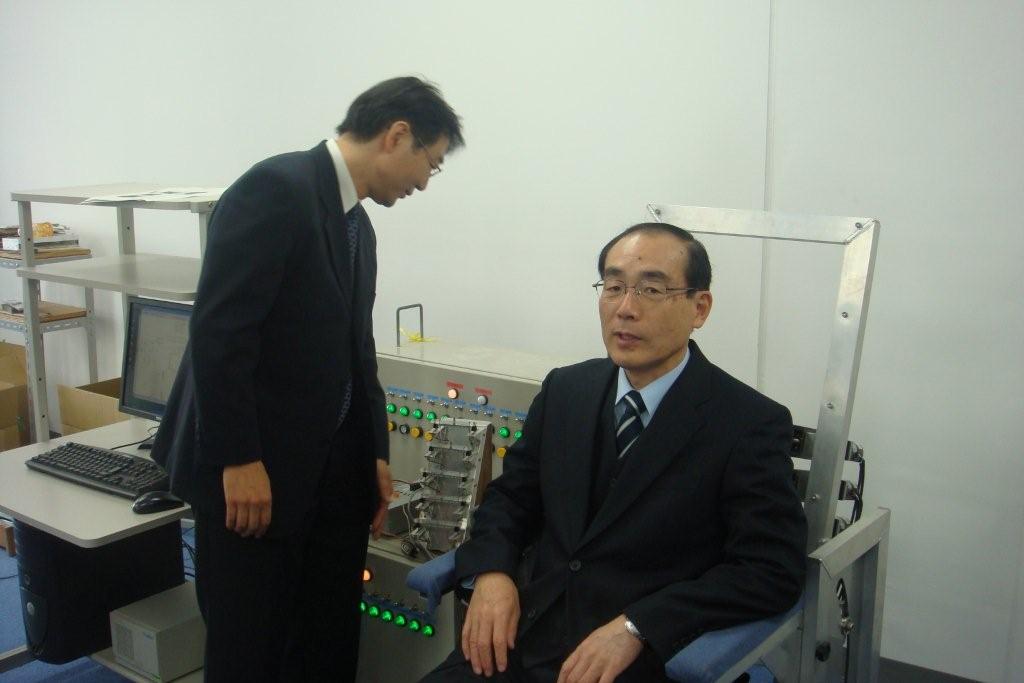
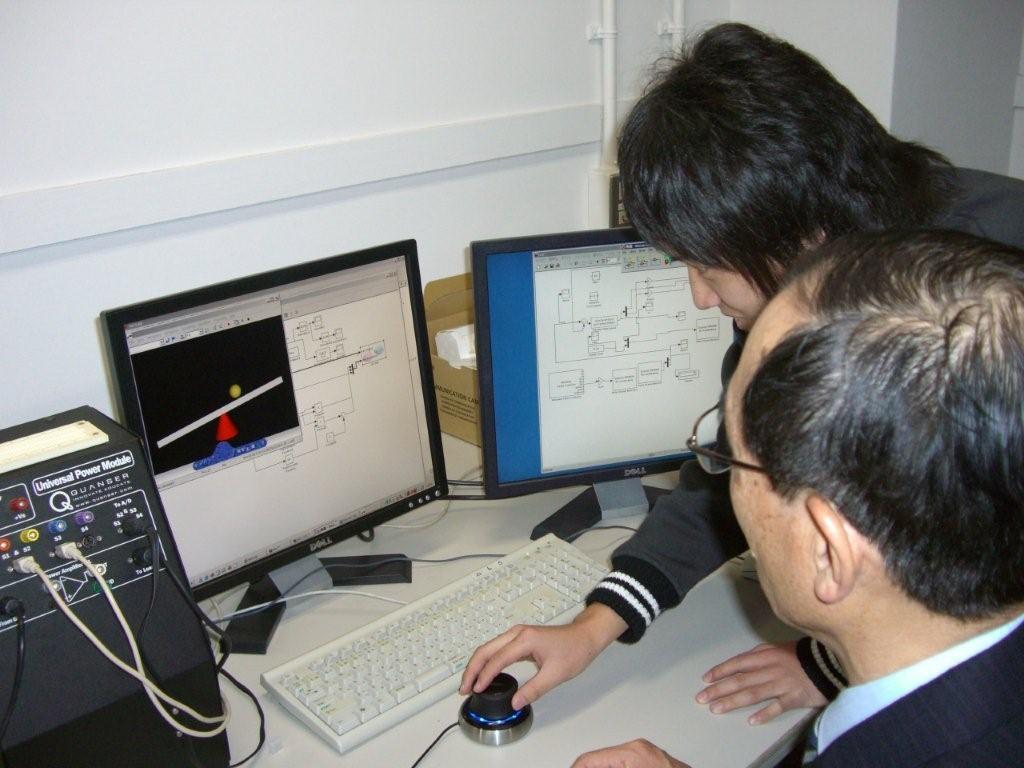
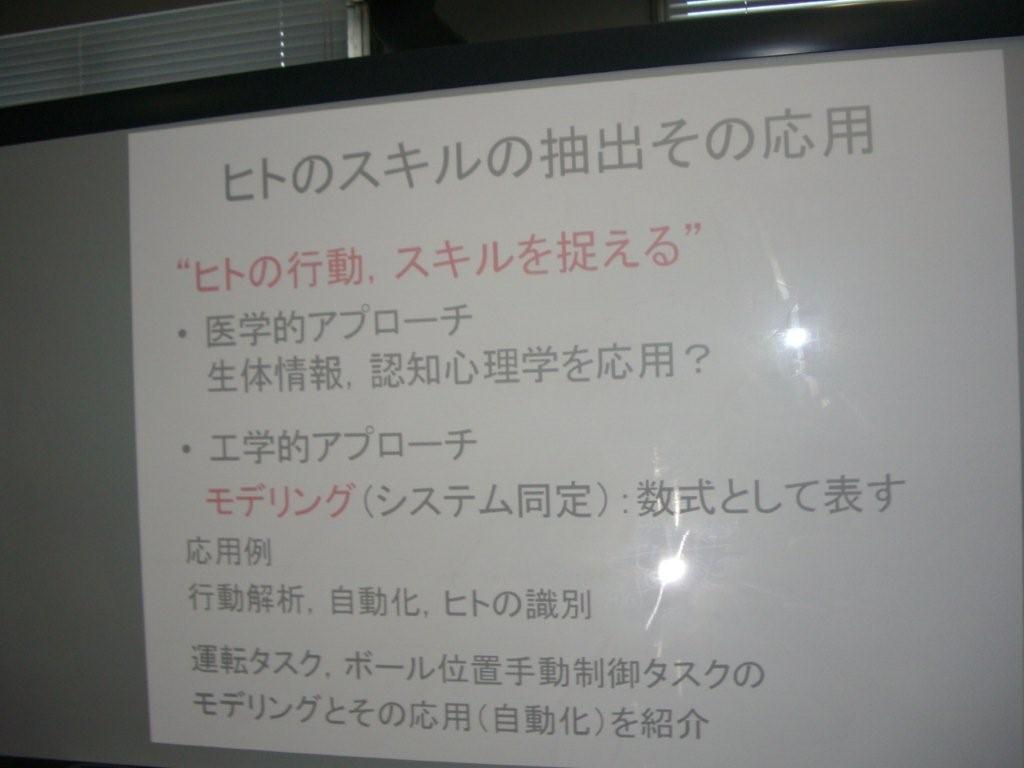
制御システム研究室では石田宗秋さんにヒューマンスキル獲得の説明をしていただき、そのための装置、たとえば、ディスプレー上のシーソー上に置かれたボールを真ん中に止める操作を体験させていただきました。
|
シーソーゲーム?は難しい |
ヒューマンスキル獲得の説明 |
制御システム研究室の院生たちと
|
電機システム研究室では、下肢リハビリ装置を体験し、また、こん棒をまるで奇術師のように倒立することのできるロボットなどを見せていただきました。
下肢リハビリ装置を体験
|
棍棒を倒立させるロボット
|
電機システム研究室の院生たちと |

一口にメカトロ・ロボットといっても、実にさまざまな研究をしているんですね。ほかにも紙面の関係でご紹介できなかった装置やロボットの研究がいっぱいありました。
ロボットというと、多くの皆さんはホンダやトヨタが作っているヒト型のロボットを思い浮かべるのではないでしょうか?しかし、ヒト型ロボットの医療や介護への応用は随分と先になり、いつになったら実現するかわかりません。私たちが今とるべき戦略としては、現実的に応用可能な人間の補助となるような装置を、できるものから開発していくことであると考えています。センターの名称として「ロボット研究センター」とせずに「医療福祉メカトロ・ロボット研究センター」あるいは「医療福祉オートメーション研究センター」などという名称を考えているのは、そういう理由ですね。
今回の見学で、私どもに対して一生けん命説明をしてくれた先生方や大学院生の皆さんに心から感謝をいたします。