重点リサーチセンター
人間共生ロボティクス・
メカトロニクスリサーチセンター
Mie University Robotics Mechatronics Research Center for Symbiosis with Humans
研究内容
人間のアシスト技術
本リサーチセンターで特に力を入れている開発テーマは、人間のアシスト技術です。工場等で利用できる産業用のアシスト装置や作業姿勢アシスト技術や自動車の運転アシスト技術、さらには医療、福祉分野にいたるまで、様々な分野で利用できるアシスト技術の開発を行っています。
これらは、人間の筋骨格系のハード特性から心理的なソフト特性までの十分な解析結果を基に築かれた技術となっています。
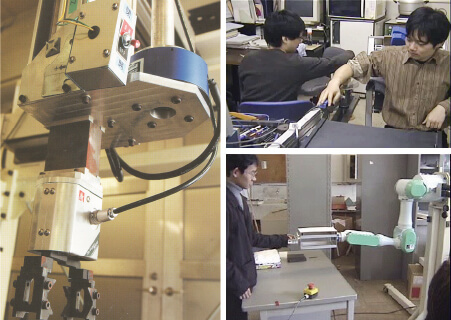
産業用アシスト技術
工場内での重量物運搬や重量物取り付け作業のための産業用アシスト装置を開発しています。人間どうしの協調動作特性を解析することにより、独自の可変インピーダンス制御手法を開発し、人間とロボットの協調運搬作業を実現しました。
この可変インピーダンス制御手法を産業用パワーアシストに適用し、重量物でもスムーズかつ容易に思った位置に位置決めすることが可能となりました。
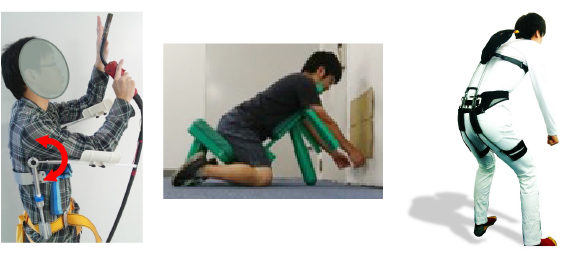
作業用姿勢アシスト技術
中腰や蹲踞など無理な姿勢で長時間作業を行うと腰痛などを発症する可能性が高まります。本研究室では、人間工学により、筋肉負担、骨への負担、関節への負担を評価し、それらを軽減する姿勢アシスト装置を開発しています。
これらは、モータなどのアクチュエータを使用せず、ばねなどの弾性材を使用しており、軽量でかつ装着性も良いことが特長です。
運転アシスト技術
現在のステアリングのアシストシステムは、アシスト時にステアリングに支援トルクを印加する方式です。このため、アシスト力を強くするとアシスト時にステアリングが取られやすくなりドライバの受容性が低いという問題がありました。
そこで、ステアリングアシストを行う際にステアリングのダイナミクスを変化させる、インピーダンス制御によるアシストシステムを提案しました。これにより、アシスト力をステアリングに印加しても、ステアリングが取られにくくなるよう機械的インピーダンスが変化するため、アシスト時のドライバ受容性が向上しました。
その他、アシスト用HMIの改善によるドライバ受容性向上に関する研究も実施しています。



医療・福祉アシスト技術
① 装着型ロボットの開発技術
人間の動作支援を行うロボット及びQOL向上を実現するロボット装具の開発を行っています。
また、人間工学を基本としたリハビリテーション用のメカニカル装具の開発も行っています。
② 人間中心ロボティクスに関する技術
主に障がい者の自立を支援するための医療・福祉ロボットの開発を行っています。



下肢筋力評価システム
高齢化が進展する先進国においては、高齢者を支援する福祉機器や、介護予防のための筋力トレーニングの必要性が高まってきています。そのため、各個人の運動機能を定量的に把握することで、この問題を解決することに取り組んでいます。
ここでは、信頼性の高い新たな筋力測定システムの開発を行っています。



アシスト技術を支える
ロボット・メカトロ技術
人間のアシスト技術を実現するには、それを支える様々な技術が必要となります。そのための構造設計やモータ、電池の高度化技術、それらの制度技術やその評価技術を有しています。
さらに、生体を評価する技術や生体と装置のインターフェース技術など、幅広い技術も有しています。
重労働作業支援技術
従事者の身体的負担を軽減させる重労働作業支援ロボットの開発を行っています。日本では他国が経験したことのない速さで少子高齢化が進行しており、それに伴い工業や農業分野では後継者不足と高齢化が深刻な問題となっています。
このため、重労働を支援するロボットが必要とされていますが、それらは悪環境下での作業が多く、従来型のロボット技術では未だ解決できていない問題も多くあります。この問題を解決するための技術開発を行っています。

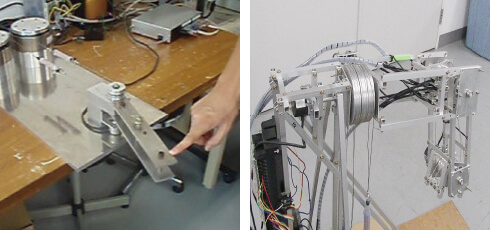
人間の特性に近い剛性可変アーム
筋は力を発揮するほど剛性が増加する特性を持ち、人は作業に応じて剛性を調節していると言われています。
一方、日本は急速な少子化によって労働力不足となっています。そのため、人間環境で人と同じ作業が行えるロボットが必要となっています。その実現のためには、接触によって危害を加えない安全性と、人間のように外界を認識して様々な作業を行えることが必要です。その実現を目指して、軽量で柔軟性のある剛性可変腱駆動アームを対象として、作業に合わせて剛性を調整でき、人と同じ2つのカメラを備え、様々なセンサ情報を組み合わせた制御手法の開発を行っています。

モーションコントロール技術
政府が提唱しているSociety 5.0では、まずフィジカル空間のセンサからの膨大な情報がサイバー空間に集積されます。
サイバー空間ではこのビッグデータを人工知能(AI)が解析し、その結果がロボットなどを通してフィジカル空間の人間に様々な形でフィードバックされます。一方で、「動きの制御」を意味するモーションコントロールでは、まずカメラなどのセンサからフィジカル空間の情報がサイバー空間に集積されます。サイバー空間ではこの情報をコントローラが解析し、その結果がフィジカル空間の機械(ロボット、モビリティ、デジタル家電など)の「動き」にフィードバックされます。
上記のようにSociety 5.0とモーションコントロールは明白なアナロジーを持つため、モーションコントロール技術は今後ますます重要になると予想されます。
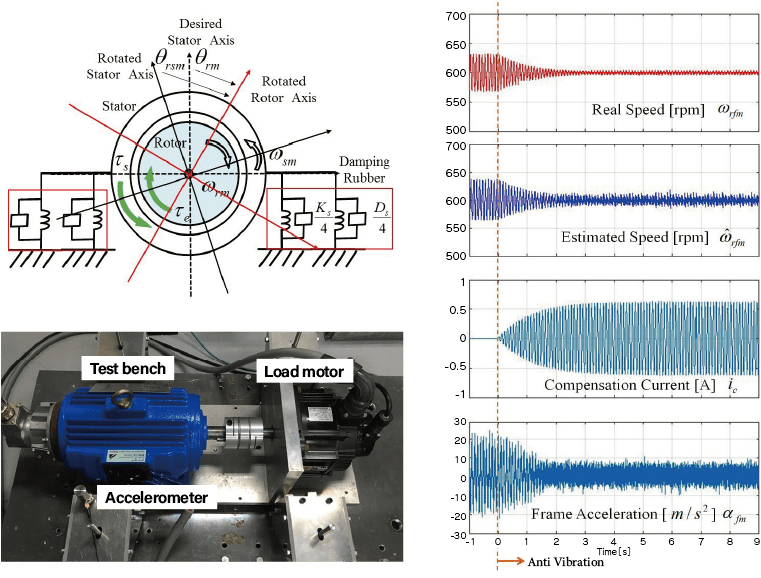
特定成分のみを除去する電気モータの振動抑制制御
本技術では電気モータの機械的な振動成分に着目、特定成分のみを電流制御によって除去する振動抑制制御を扱います。
これまでの成果では、フーリエ変換などを用いて特定の周波数成分を抽出、これを打ち消すような電流/トルク指令を生成することにより振動成分のみを除去することに成功しています。しかし、フーリエ変換を利用するが故に過渡解析などが困難となり、制御設計が試行錯誤的になるという欠点を有していました。
現在はフーリエ変換を含めた制御器特性を同定、線形化することにより特性解析を行っており、妥当性検証を行っているほか、これらの結果を踏まえた最適設計法の開発に取り組んでいます。
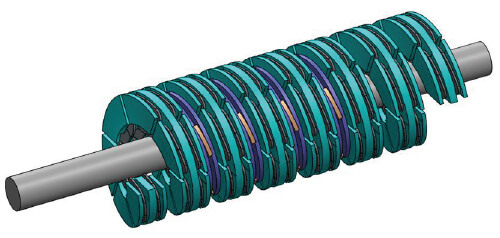
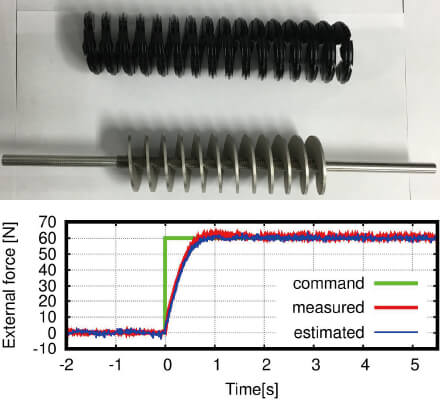
小型高推力直動モータ(スパイラルモータ)の開発
本研究では横浜国立大学 藤本康孝教授との共同研究により、従来の円柱型直動モータと比べ、約2倍から数倍程度の推力密度を有する小型高推力な直動モータ(スパイラルモータ)の制御方式・駆動装置に関する研究を現在は行っています。
今後、モータ設計なども着手していく予定です。このモータはらせん状に巻線、永久磁石を配置することで、単位体積あたりの電磁力発生面積を向上させることで、高推力密度化を実現しています。
また、構造はボールねじと似ているものの、雄ねじに相当する可動子は電磁力、磁気吸引力によって磁気浮上しており、摩擦は軸受けなどのみです。外力が損失なくモータに伝達されるため、モータ側位置・電流検出器からこれを推定、安全な制御が可能です。
制御系設計技術
アシスト技術などの高度なロボット・メカトロニクス技術を実現する基本要素の一つとして、高速・高精度な制御系の実現が挙げられます。
高速・高精度な制御系を実現するためには制御したい対象の精密な数学モデルを基に制御方策を決定する必要があります。しかし、複雑なシステムであればあるほど対象の精密な数学モデルを得ることが困難になります。対象の数学モデルは対象から得られる入出力データから同定を行うが、本技術では数学モデルを同定することなく、入出力データから直接制御系を設計することを可能にします。
本技術によりモデル化に係る困難さを回避し、また最適化手法により制御器の調整を行うことで調整の手間を軽減することができます。
燃料電池評価のための電気的等価モデルを用いた 模擬装置の開発に関する研究
燃料電池は環境汚染の原因となるCO2、NOx等を排出せず、また、燃料があれば継続的に発電を行うことが出来るため、バッテリの様に長時間の充電を行う必要がありません。そのため、室内外で稼働するアシストロボットの駆動電源として期待が高まっています。しかしながら、燃料電池は周囲の環境の変化や負荷電流に応じて出力電圧が変動します。そのため、電源の安定化を目的とした電力変換装置が必要となります。装置の開発には、実際に燃料電池を接続する試験が必要になるが、現在の燃料電池の寿命は非常に短く、使用により時々刻々劣化が進むため、同一環境下での試験が困難になると予想されます。そのため、試験を容易に行うため電気的な特性を模擬した燃料電池模擬装置の開発を行なっています。
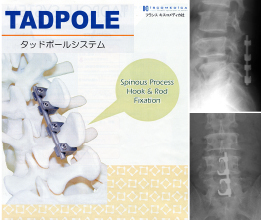
生体強度評価技術
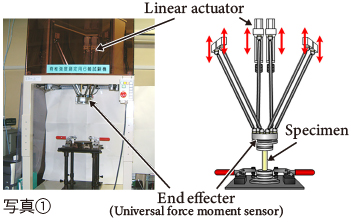
身体運動の軸機関および支持機関である脊椎の疾患に対する診断・治療において、脊椎の強度および剛性を定量的に把握することは、適切な治療方針・手術手技を決定する上で極めて重要です。
そこで本研究室では、脊椎の剛性を力学的観点より明らかにするとともに、脊椎外科で使用される体内固定具の性能や効果を定量的に評価することを目的とし、複雑な脊椎変形挙動を実験的に調査することのできる脊椎強度測定用6軸材料試験機(写真①)を開発しました。
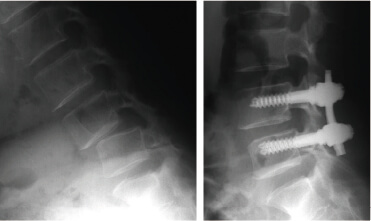
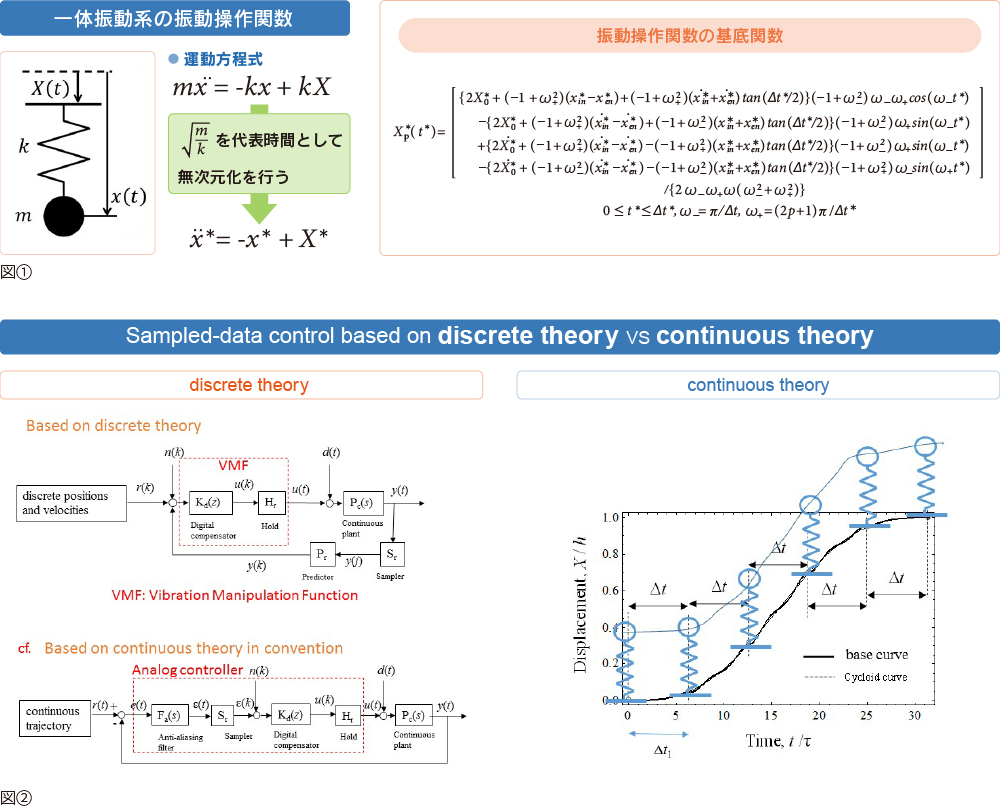
天井クレーンの制振搬送軌道生成技術
天井クレーンは、その搬送において高速な操作とともに、様々な外乱に対してロバストな制振性を保証する必要性があります。
本技術は、本研究室で新たに開発した振動操作関数(図①)による区分サンプル値制御(図②)を用いることで、荷からなる振子の固有周期の約半分の操作時間内の連続フィードフォワード制御と操作時間毎の離散フィードバックを実現し、ロバストで高速な任意の軌道生成を実現する技術です。懸垂型搬送機械の自動制御は元より、人による任意の操作の制振アシスト技術としても有効です。
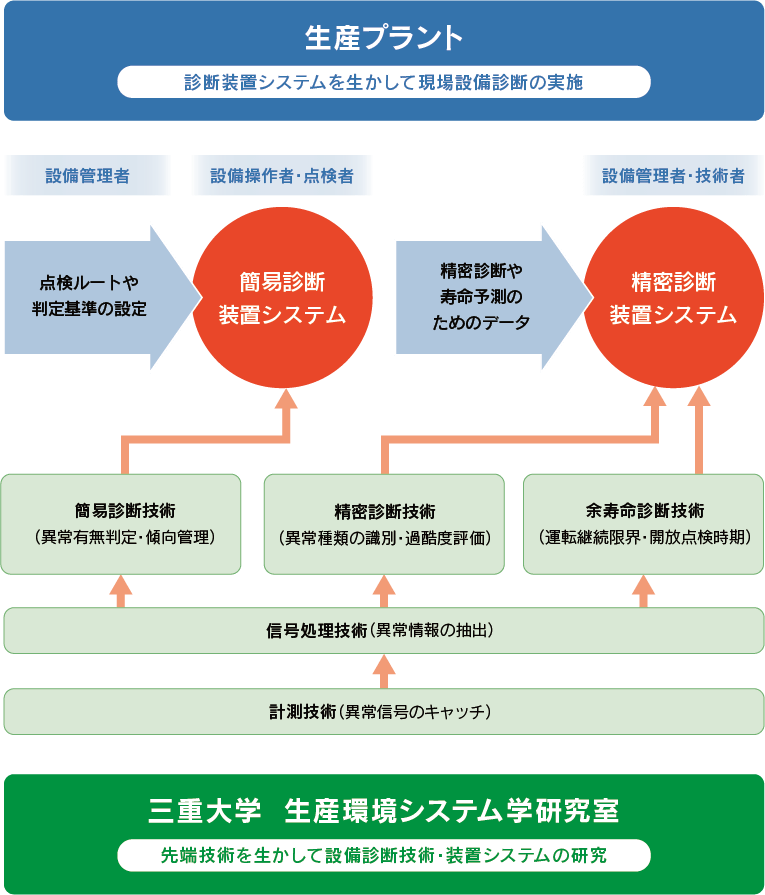
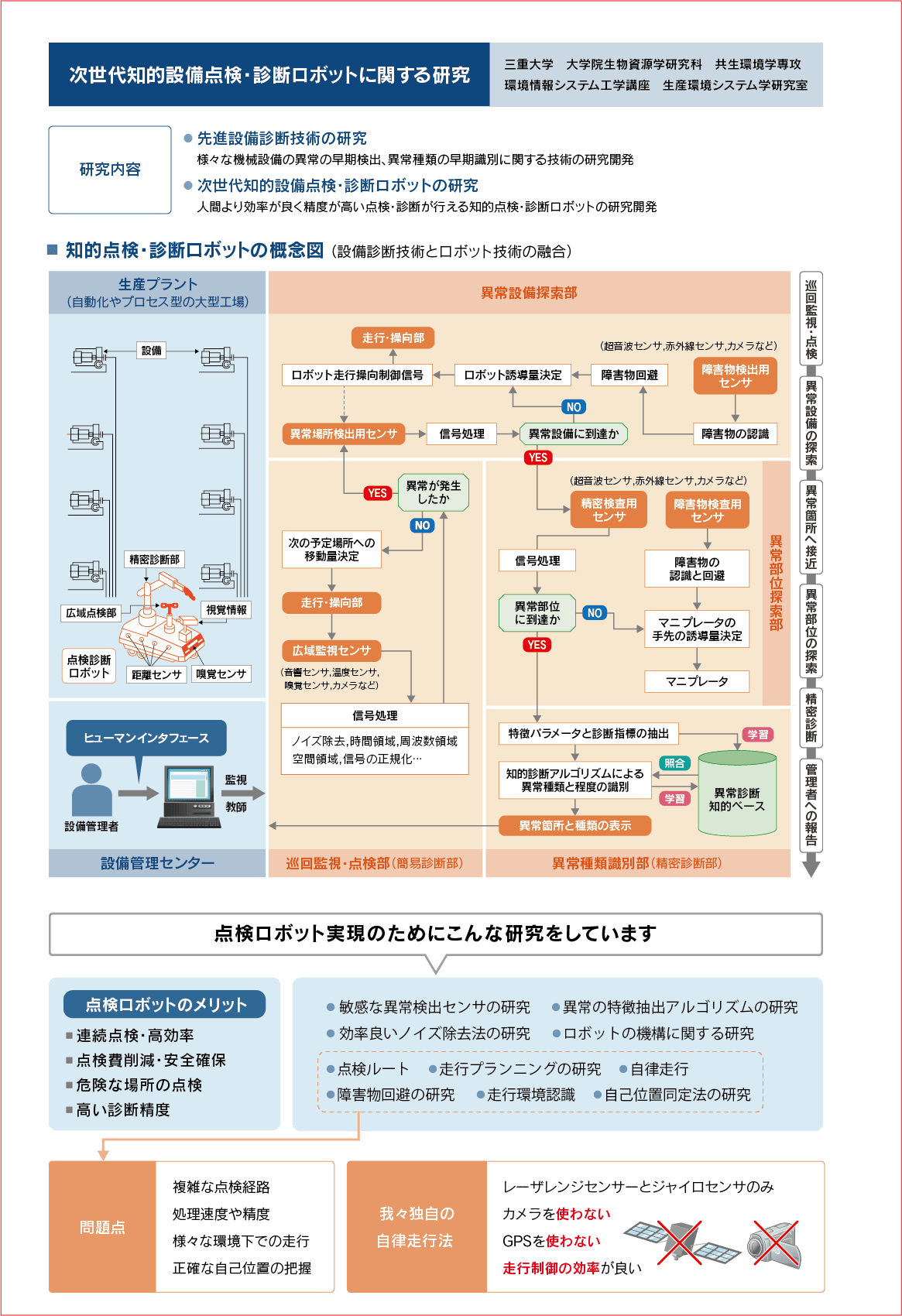
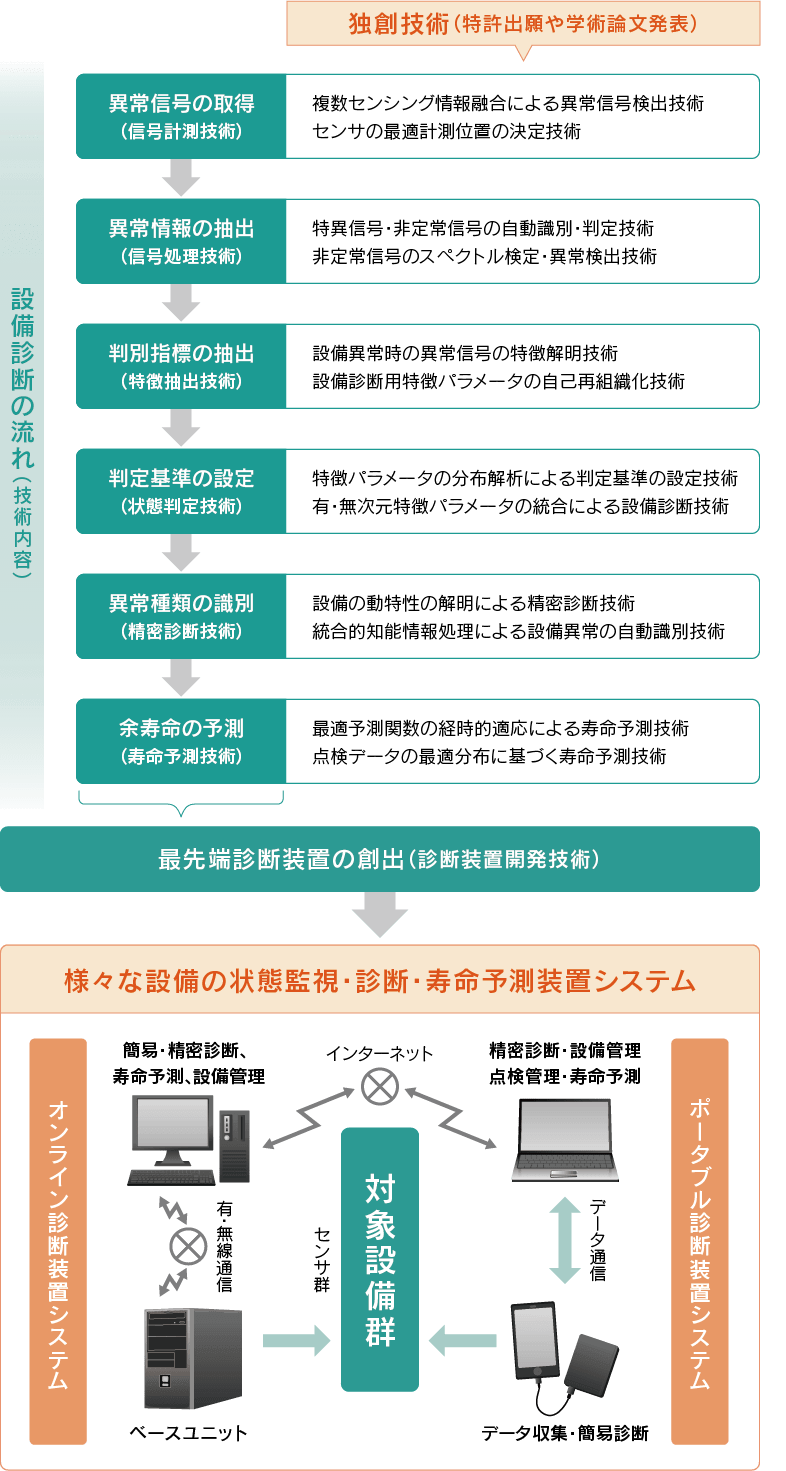
機械設備診断技術
設備診断技術は「計測技術」、「信号処理技術」、「簡易診断技術」、「精密診断技術」および「余寿命診断技術」から構成されます。
本研究室では長年一貫して設備診断技術に関連する諸要素技術、特に回転機械診断技術に関する基礎・応用研究を行い、先進かつ実用な「簡易・精密診断装置システム」の開発技術および現場設備診断の応用技術の高度化に関する研究を行ってきました。
製造高度化技術
本センターでは、金型プレスと鋳造において、製造効率を飛躍的に高度化できる技術を有しています。
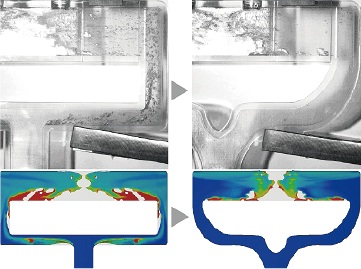
金型プレスでは、従来にない独自の金型設計手法により、下死点を高度に安定化し、プレス製品の品質を安定かつ飛躍的に向上させることができます。また、鋳造では、高度なシミュレーション技術により、実際に鋳込むことなくコンピュータによる計算にて最適に鋳型を設計することができます。
高度金型プレス技術
従来の精密プレス加工では、下死点の高度な位置決め精度が要求されるため、高価なサーボプレスを使用しなければなりませんでした。また、設計どおりに製品ができるとは限らず、金型の修正に時間とコストがかかっていました。さらに、安定なプレス動作にするため、室温の管理や打ち始め製品の廃棄なども必要となっていました。
そこで、プレス機のスライダーと上型を固定せずにばねにて柔軟に連結する、従来のプレス手法の概念を変える新しい手法を開発しました。
これにより、今までの問題を解決し、低コストで高精度な精密プレスを実現することが可能となります。



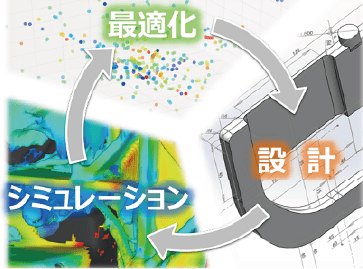
CFD最適化技術
CFD(Computational Fluid Dynamics: 数値流体力学)シミュレータを援用した流体挙動の最適化に関する研究を行っています。
CFDとは流体の運動に関する偏微分方程式を数値的に解くことで流体の解析を実現する技術であり、CFDシミュレーションの解析結果に基づいた最適化を行うもので、「CFD最適化」と呼びます。
この「CFD最適化」に関する技術は、ダイカストや重力鋳造といった鋳造プロセスや人の血液を取り扱う医療システムの開発など、あらゆる液体を扱うプロセスに適用することが可能です。