モーションコントロール
リサーチセンター
Motion control Research Center
研究内容
通信ネットワーク
数理モデルによるネットワークの性能解析を行っている。例えば、同一周波数帯で送信と受信を同時に行う無線全二重通信ネットワーク(適用例:無線LAN、セルラーネットワーク)、広範囲で膨大な端末で構成されるIoTネットワーク(適用例:センサーネットワーク)、通信基地局を必要としないアドホックネットワーク(適用例:車車間通信、ドローンネットワーク)を解析している。
数理モデルによるネットワークの性能解析
ネットワーク解析に必要な数学 → 確率統計, 待ち行列理論, グラフ理論, 最適化理論
- 数理モデルの応用例
-
- 性能評価
- 通信プロトコル設計
- 最適な制御パラメータの導出
- システムの動作の直感的理解
これまで解析対象としてきたネットワーク例
-

同一周波数帯で送信と受信を同時に行う無線全二重通信ネットワーク
(適用例: 無線LAN, セルラーネットワーク) -

広範囲で膨大な端末で構成されるIoTネットワーク
(適用例: センサーネットワーク) -

通信基地局を必要としないアドホックネットワーク
(適用例: 車車間通信, ドローンネットワーク)
モータ・パワーエレクトロニクス
小型高推力密度ダイレクトドライブモータ(スパイラルモータ)、交直両用直接型電力変換器(マトリックスコンバータ)、モータの振動抑制制御手法を研究開発している。
-
小型高推力密度DDリニアモータ
(スパイラルモータ)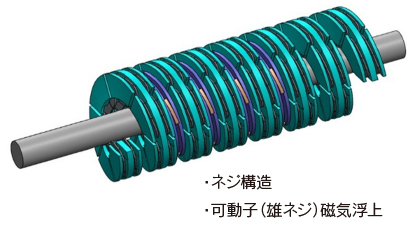
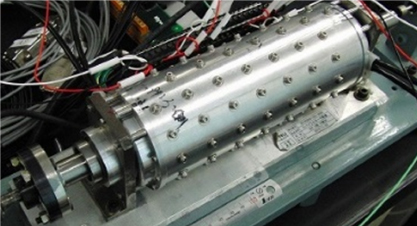
円筒形と比べ,約3倍程度の推力密度実証済
負荷力推定可かつ,高推力
最新は解析上10倍程度となる -
位置情報のみを用いた
特定振動トルク除去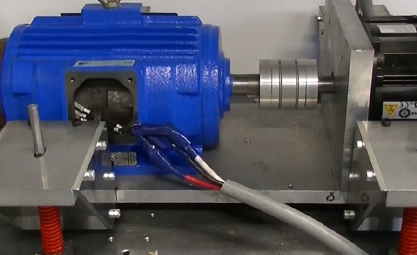
モータ位置信号のフーリエ変換による振動補償
安価な振動抑制制御
完全消去されるまで自動調整 -
交直両用直接形電力変換
DC/AC(3レベル) AC/AC変換を同一回路で実現
共通化による低コスト化を期待
既存製品の主回路共通化や,省スペース化
レーザ溶接・切断
レーザロール溶接を用いた異種金属接合、熱容量の差が大きい細線材と板材との加圧とレーザ照射による溶接、産業用ロボットに把持させた加工ヘッドによる高品質なレーザ切断の研究開発をしている。
-
レーザによる異種金属接合

レーザロール溶接の適用により
通常は困難な異種金属接合を実現- 低炭素鋼+アルミニウム合金
- 亜鉛めっき鋼+アルミニウム合金
- 低炭素鋼+純チタン
- 純チタン+アルミニウム合金
- 低炭素鋼+マグネシウム合金
-
細線材と板材とのレーザ微細溶接

熱容量の差が大きい細線材と板材を、
加圧とレーザ照射により溶接 -
レーザ切断
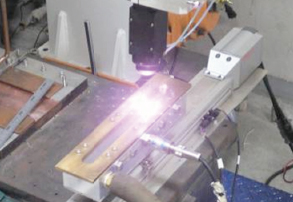
レーザ切断の加工ヘッドを産業用ロボットに
把持させて,高品質に切断
高精度金型プレス
プレス機スライダーの不安定な位置決め精度に影響せず、高い加工精度を安定して実現する金型プレス手法を研究開発している。この手法により、熟練作業者による金型の調整や高価な高精度プレス機の導入が不要となる。
-
従 来

サーボプレスを用いた従来の金型プレス
- プレス機スライダーの不安定な位置決め精度に
より加工力精度が不安定 - 熟練作業者による金型の調整が必要
- 高価な高精度プレス機の導入が必要
- プレス機スライダーの不安定な位置決め精度に
-
提案技術

提案する金型プレス手法
- プレス機スライダーの不安定な位置決め精度に
影響せず,加工力精度が安定 - 熟練作業者による金型の調整が不要
- 高価な高精度プレス機の導入が不要
- プレス機スライダーの不安定な位置決め精度に
精密加工
手先効果器を精密位置決めする硬さ、加工対象物に任意の接触力を加えられる柔らかさ、高速で任意の位置・姿勢に調整する可操作性を兼ね備えた工作機械・ロボットアームを研究開発し、組立作業(組み付け、ねじ締め)・仕上げ作業(バリ取り、面取り、研磨)、食品加工等の自動化を目指す。
-
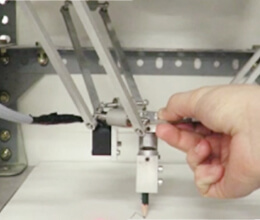
筆記動作の教示。
筆跡や筆圧を記録。 -
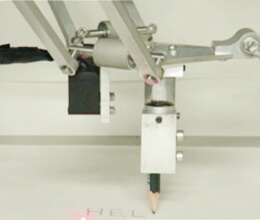
モータのトルク制御によって筆記動作を再現。
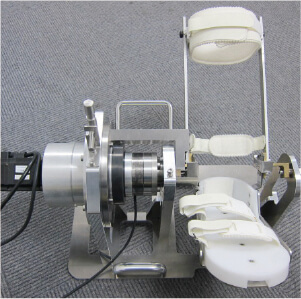
人間機械システム
足関節を精密に等速度運動させる硬さ、足関節に任意のトルクを加えられる柔らかさ、50Nmを超える痙縮トルクに負けず高速動作できる可操作性を兼ね備えた下肢運動機能評価装置を研究開発し、痙縮・拘縮・運動疾患・筋力等の自動診断・評価を目指す。
無人航空機
機体を精密位置決めする硬さ、接触対象物に任意の接触力を加えられる柔らかさ、高速で任意の位置・姿勢に調整する可操作性を兼ね備えたクワッドティルトロータを研究開発し、トンネル打音検診・外壁塗装・鉄骨造接合部のボルト固定等の高所作業自動化を目指す。
